 Image credit: Unsplash
Image credit: Unsplash
Image credit: Unsplash
Image credit: Unsplash
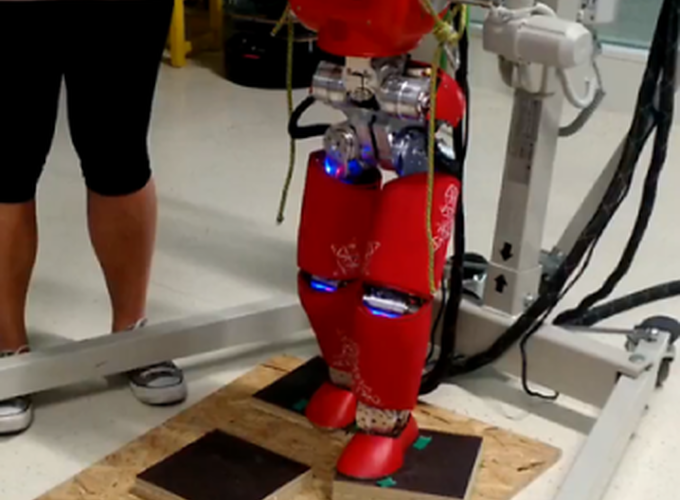
The iCub humanoid robot was not meant for walking when it was first “born” in 2008, but a new design of the legs introduced in 2013 unlocked new research and application directions for the robot. In this talk, I will present my experience working with two different iCub robots: one with only torso and legs, and one full iCub with a battery pack. I had several years of first-hand practical experience in implementing demos on the iCub robot, ranging from walking sequences in different environments, to the “Yoga” demo, to the teleoperated loco-manipulation framework. Behind each successful demo, there are years of research, months of practical testing and careful tuning, and many many robot failures and repairs. I will share with you some stories of the success and failures of working with the iCub both in the lab and also in the public!